SkyRunners
Stanford’s Autonomous UAV Team
We’re building an end-to-end drone delivery system—from campus logistics to disaster response.
Join the team designing the future of autonomous flight.















Project Timeline
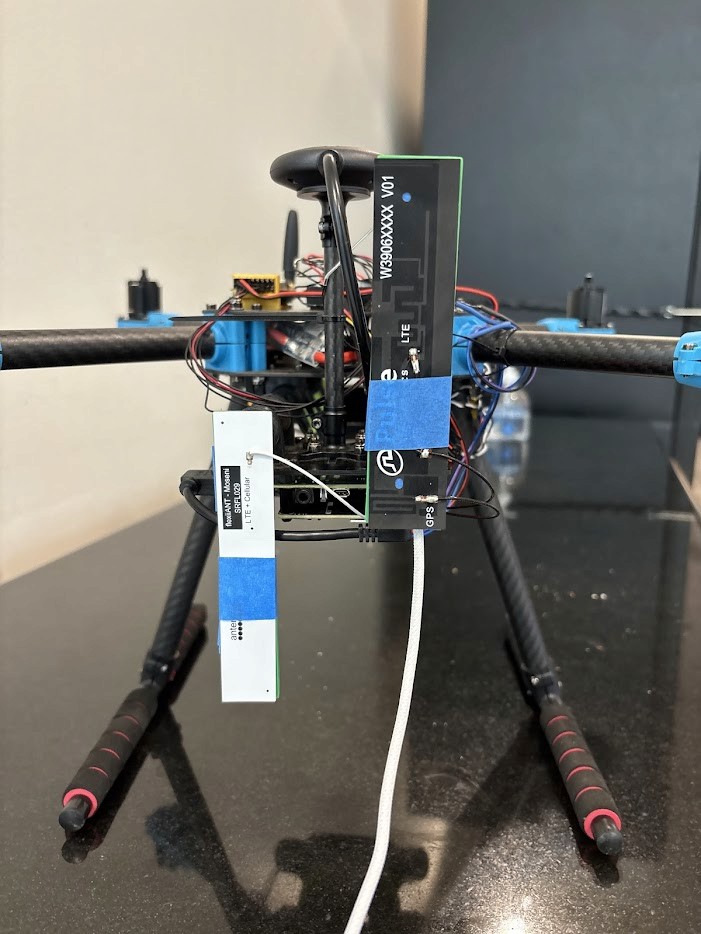
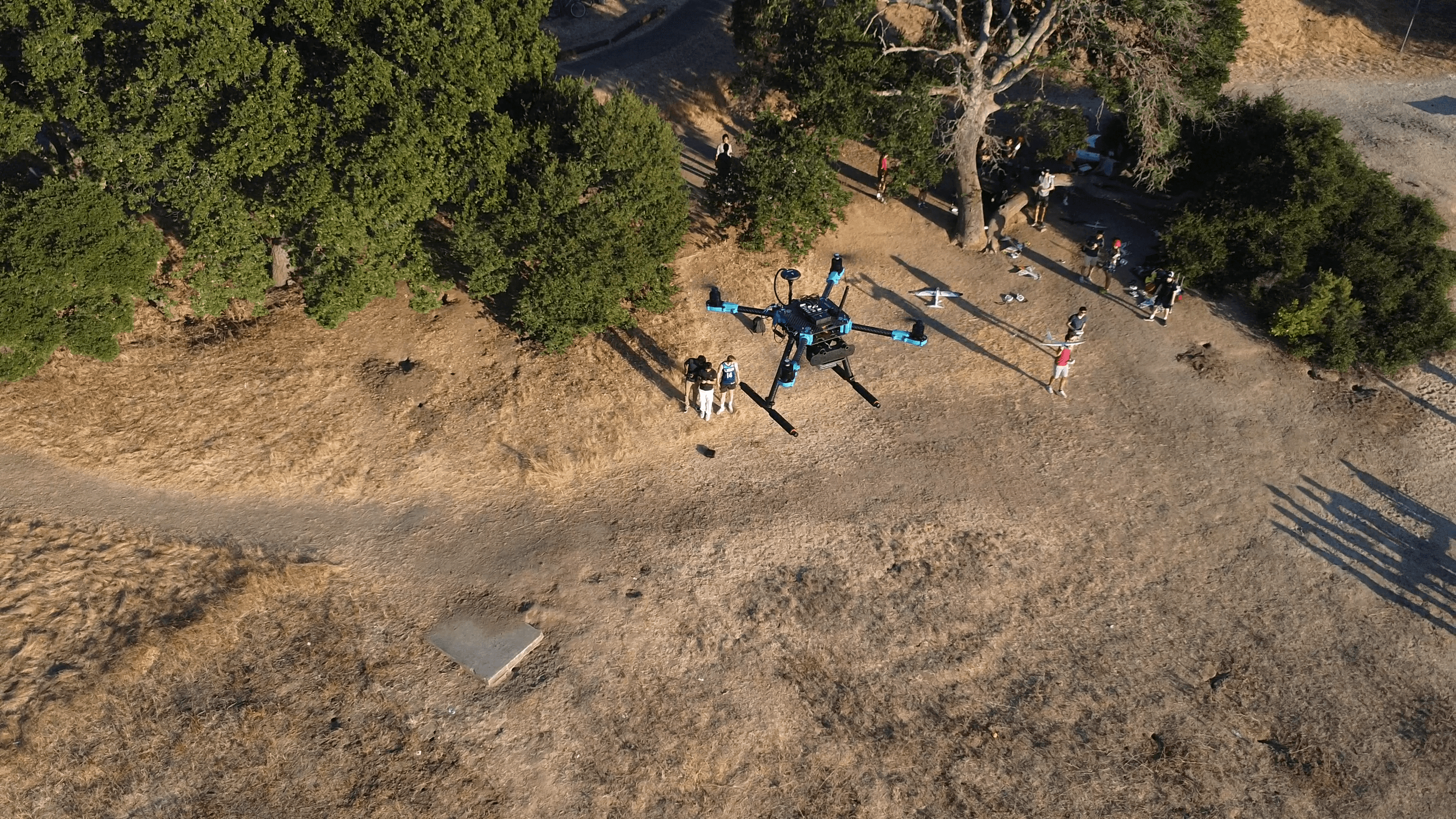
Sky 1: Autonomous Delivery Quadcopter
June 2024
-
December 2025
Sky 1 is our first fully customized quadcopter platform, built around the Pixhawk 6C flight controller with GPS, a downward-facing rangefinder, multiple onboard cameras, and both 4G and long-range telemetry radios. Designed for precision navigation across the Stanford campus, it integrates AprilTag-based landing, autonomous waypoint routing, and real-time ground control via LTE. A 1lb payload dispenser is mounted for autonomous drop-off missions. Currently in flight testing, Sky 1 serves as our proving ground for autonomous last-mile delivery, precision landings, and resilient communication links. This platform helps us iterate fast on key autonomy modules before scaling to larger airframes.
Sky 2: VTOL Range & Efficiency Testbed
Spring 2025
-
December 2025
Sky 2 is a fixed-wing VTOL drone designed for improved flight endurance, higher payload capacity, and robust mode transitions. Equipped with four upward-facing lift motors and a rear pusher prop, it blends vertical takeoff capabilities with the aerodynamic efficiency of fixed-wing cruise. Intended to carry a 2lb payload, Sky 2 will enable experiments with energy-efficient flight, long-range navigation, and seamless mission switching. Currently under active construction, this platform pushes the limits of what’s possible in hybrid UAV design, laying the groundwork for our future production models.
Sky 3: Full-Stack Autonomous Beta UAV
Fall 2025
-
December 2026
Sky 3 will culminate our UAV development roadmap: a fixed-wing VTOL that merges Sky 1’s autonomy stack with Sky 2’s VTOL design. Designed to carry heavier payloads and handle full delivery missions, Sky 3 will integrate advanced safety systems, redundant comms, and real-time edge AI processing via NVIDIA Orin. Still in its design phase, Sky 3 represents our first end-to-end beta model for autonomous aerial delivery. It will be the backbone of our future flight operations, enabling smarter missions, real-world deployments, and onboard decision-making without cloud dependence.

SkyRunners
Stanford’s Autonomous UAV Team
We’re building an end-to-end drone delivery system—from campus logistics to disaster response.
Join the team designing the future of autonomous flight.
Project Timeline
Sky 1: Autonomous Delivery Quadcopter
June 2024
-
December 2025
Sky 1 is our first fully customized quadcopter platform, built around the Pixhawk 6C flight controller with GPS, a downward-facing rangefinder, multiple onboard cameras, and both 4G and long-range telemetry radios. Designed for precision navigation across the Stanford campus, it integrates AprilTag-based landing, autonomous waypoint routing, and real-time ground control via LTE. A 1lb payload dispenser is mounted for autonomous drop-off missions. Currently in flight testing, Sky 1 serves as our proving ground for autonomous last-mile delivery, precision landings, and resilient communication links. This platform helps us iterate fast on key autonomy modules before scaling to larger airframes.
Sky 2: VTOL Range & Efficiency Testbed
Spring 2025
-
December 2025
Sky 2 is a fixed-wing VTOL drone designed for improved flight endurance, higher payload capacity, and robust mode transitions. Equipped with four upward-facing lift motors and a rear pusher prop, it blends vertical takeoff capabilities with the aerodynamic efficiency of fixed-wing cruise. Intended to carry a 2lb payload, Sky 2 will enable experiments with energy-efficient flight, long-range navigation, and seamless mission switching. Currently under active construction, this platform pushes the limits of what’s possible in hybrid UAV design, laying the groundwork for our future production models.
Sky 3: Full-Stack Autonomous Beta UAV
Fall 2025
-
December 2026
Sky 3 will culminate our UAV development roadmap: a fixed-wing VTOL that merges Sky 1’s autonomy stack with Sky 2’s VTOL design. Designed to carry heavier payloads and handle full delivery missions, Sky 3 will integrate advanced safety systems, redundant comms, and real-time edge AI processing via NVIDIA Orin. Still in its design phase, Sky 3 represents our first end-to-end beta model for autonomous aerial delivery. It will be the backbone of our future flight operations, enabling smarter missions, real-world deployments, and onboard decision-making without cloud dependence.
SkyRunners
Stanford’s Autonomous UAV Team
We’re building an end-to-end drone delivery system—from campus logistics to disaster response.
Join the team designing the future of autonomous flight.
Project Timeline
Sky 1: Autonomous Delivery Quadcopter
June 2024
-
December 2025
Sky 1 is our first fully customized quadcopter platform, built around the Pixhawk 6C flight controller with GPS, a downward-facing rangefinder, multiple onboard cameras, and both 4G and long-range telemetry radios. Designed for precision navigation across the Stanford campus, it integrates AprilTag-based landing, autonomous waypoint routing, and real-time ground control via LTE. A 1lb payload dispenser is mounted for autonomous drop-off missions. Currently in flight testing, Sky 1 serves as our proving ground for autonomous last-mile delivery, precision landings, and resilient communication links. This platform helps us iterate fast on key autonomy modules before scaling to larger airframes.
Sky 2: VTOL Range & Efficiency Testbed
Spring 2025
-
December 2025
Sky 2 is a fixed-wing VTOL drone designed for improved flight endurance, higher payload capacity, and robust mode transitions. Equipped with four upward-facing lift motors and a rear pusher prop, it blends vertical takeoff capabilities with the aerodynamic efficiency of fixed-wing cruise. Intended to carry a 2lb payload, Sky 2 will enable experiments with energy-efficient flight, long-range navigation, and seamless mission switching. Currently under active construction, this platform pushes the limits of what’s possible in hybrid UAV design, laying the groundwork for our future production models.
Sky 3: Full-Stack Autonomous Beta UAV
Fall 2025
-
December 2026
Sky 3 will culminate our UAV development roadmap: a fixed-wing VTOL that merges Sky 1’s autonomy stack with Sky 2’s VTOL design. Designed to carry heavier payloads and handle full delivery missions, Sky 3 will integrate advanced safety systems, redundant comms, and real-time edge AI processing via NVIDIA Orin. Still in its design phase, Sky 3 represents our first end-to-end beta model for autonomous aerial delivery. It will be the backbone of our future flight operations, enabling smarter missions, real-world deployments, and onboard decision-making without cloud dependence.